引论
正如名字所言,最短路径算法就是为了找到一个图中,某一个点到其他点的最短路径或者是距离。
最短路径算法一般分为四种情况:
- 无权重的最短路径
- 有权重的最短路径
- 边的权重为负的图
- 无圈的图
ps:上面的情况针对的都是有向图。
无权重的最短路径
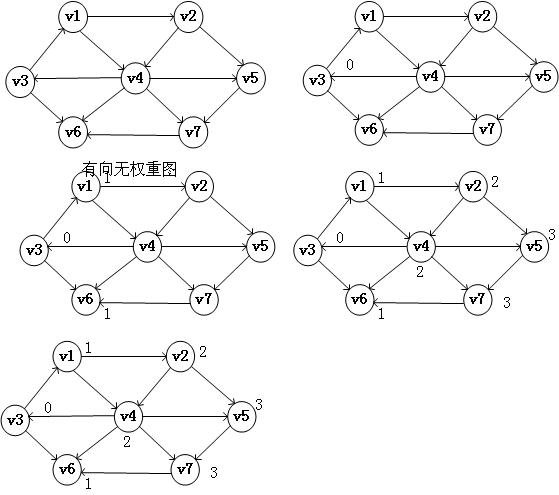
下图是一个例子:假设我们取点v3作为初始点,计算点v3到图中所有点的路径以及距离(包括点v3)。
- v3到v3的路径长为0。
- 沿着v3的邻接点查找,找到v1,那么v3到v1的路径长为1;找到v6,那么v3到v6的路径长为1。
- v3的邻接点已经找完了,接下来找v1,v6的邻接点。
- v1的邻接点为v2,v4,它们对应的路经长为2;v6无邻接点,v6部分结束。
- v2的邻接点为v4,v5,而v4已经查找过了,舍弃;v2到v5的路径长为3;v4的邻接点为v5,v7,而v5已经查找过了,舍弃;v4到v7的路径长为3。
- 至此,结束。
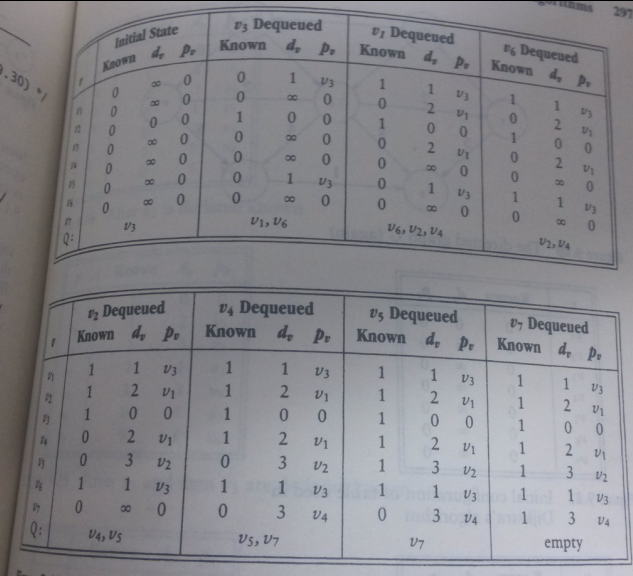
对于这一步骤,可以用一个表格来表示,以便于编程理解:
表中有3个表示状态的变量:
- dv表示点s到图中每个点的距离,结合上面的例子,s=v3.
- pv表示图中点的路径前继点。
- Known表示点是否被处理,处理了,则标记为1 。
1 | void Unweighted(Table T) |
通拓扑排序一样,对于上面的程序也是存在改进的地方的(for each vertex V),我们没有必要去对each vertex V做一下这么多的步骤,只需要对相邻接的点做就好了。因此用一个队列来使每一个处理的点入队,然后处理其邻接的点。
1 | void Unweighted(Table T) |
这个优化实际上就是BFS(广度优先算法)。
有权重的最短路径
有权重的最短路径算法,称之为Dijkstra‘s algorithm。相对于无权重的最短路径算法,有权重的最短路径算法会显得难一点,这是因为权重的引入会使某些路径的加权重长度发生颠倒。
Dijkstra‘s algorithm是一种greedy algorithm。贪婪算法就是在算法的每一个阶段都取最大值。一般情况下,贪婪算法能取得较好的效果。但是贪婪算法是有其缺陷的,也就是说能达到局部最优,而未必能达到全局最优,举个例子,假设要兑换15分的硬币,而硬币有12分的,10分的,5分的,1分的,那么根据贪婪算法,最终的兑换结果为1个12分的,3个一分的;而最优结果应该是一个10分的,一个5分的。(这里我们定义最优为硬币个数最少)。
Dijkstra‘s algorithm的步骤是:
对于每一个阶段,Dijkstra‘s algorithm会在所有未处理的点中选取一个最小距离的点v,然后把给定点s到v的路径定义为最小路径。
下面我们来分析下图的例子: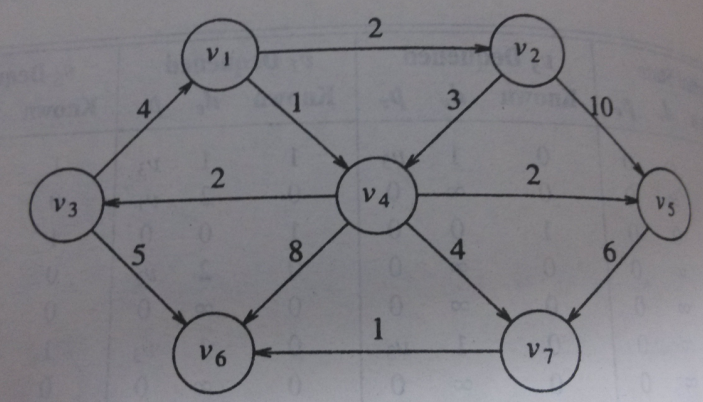
对应的表的形式如下: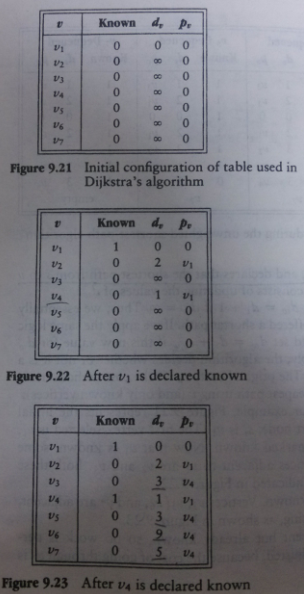
下面是具体的实现说明:
最初的点s=v1;计算s到图中所有点的最短路径。
找到v1邻接的点v2,v4,分别标出s到v2,v4的路径长,同时对v1标注T[v1].Known=1。
由于v4路径长较小,因此选择v4,找到v4邻接的点v3,v5,v6,v7,标注出他们的路径长;同时对v1标注T[v4].Known=1。
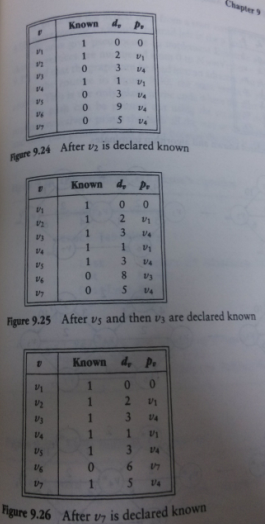
现有的所有未处理路径中v2最短,因此处理v2,找到v2邻接的点v4,v5; v2到v4,v5的路径长远大于v4,v5已有的路径长,因此不更新。同时T[v2].Known=1。
现有的所有未处理路径中v3,v5最短,处理v3,邻接点为v1,v6,路径分别为7,8;对于v3到v6的距离,因为8<9,因此需要更新;对于v3到v1的距离不需要更新。同时T[v3].Known=1。
对于v5,邻接点为v7,v5到v7的路径长为 3+6>5,因此不更新;同时T[v5].Known=1。
现在处理v7,v7的邻接点为v6,v7到v6的路径长为5+1<8,因此需要更新;同时T[v7].Known=1。
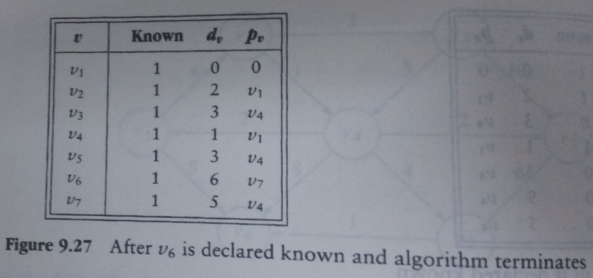
现在处理v6,v6没有邻接点了,因此可以结束了。同时T[v6].Known=1。
代码如下:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45typedef int Vertex;
typedef int DistType;
struct TableEntry
{
List Header;
int Known;
DistType Dist;
Vertex Path;
}
#define NotAVertex (-1)
typedef struct TableEntry Table[NumVertex];
void InitTable(Vertex Start,Graph G,Table T)
{
int i;
ReadGraph(G,T);
for(i=0;i<NumVertex;i++)
{
T[i].Known = 0;
T[i].Dist = Infinity;
T[i].Path = NotAVertex;
}
T[Start].Dist = 0;
}
void Dijkstra(Table T)
{
Vertex V,W;
for(;;)
{
V = FindSmallestUnknownDistanceVertex();
if(V==NotAVertex)
break;
T[V].Known = Ture;
for each W adjacent to V
if(!T[V].Known)
if(T[V].Dist+Cvw<T[W].Dist)
{
Decrease(T[W].Dist to T[V].Dist+Cvw);
T[W].Path = V;
}
}
}
边的权重为负的图
边的权重为负,这将是一个比较糟糕的事情,这无法利用上面的两种方法处理,因为只要循环负边,则路径可以无限变小,如下图所示:
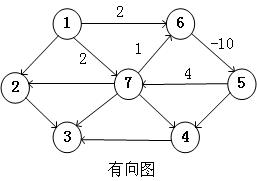
点1到点6的最短路径是2么?当然不是,我们没法求出其最短路径,因为我们可以沿着路径1,6,5,7,6这样一次下来,路径为-3,由于6,5,7,6是一个圈,我们可以一直循环下去且路径为负值,因此无法确定点1到点6的最短路径。
那么遇到这种问题该怎么解决呢?
- 给所有权重加上一个正值,是所有权重均为非负,上面的例子中,所有权重加上11,则就可以应用Dijkstra方法处理了。
无圈的图
对于无圈图,也可以应用Dijkstra方法处理,无圈图也可以看做是上面的一种特例。对于无圈图,可以利用拓扑排序的顺序选择起始点,权重的更新也可以按照拓扑排序的顺序进行,因此算法可以一次进行,这个可以看做是对Dijkstra方法的改进,并且是向简单方向的改进。
无圈图可以模拟像下坡滑雪等问题,一直需要沿着向下的方向,不应该有圈。
而无圈图的最大应用不在这里,而是一个被称之为关键路径分析法的应用。
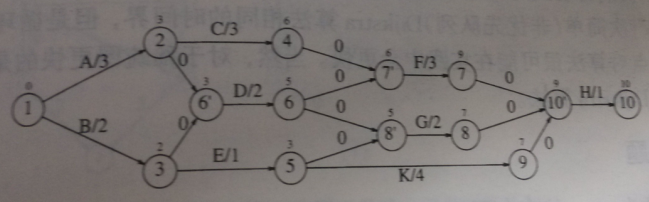
如下图所示:
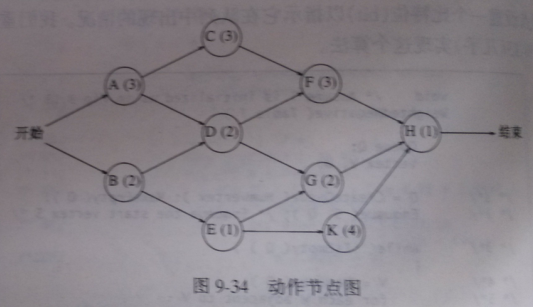
这幅图表示的意思是要想做D中的事情,必须先做完A和B,而A,B则是可以并行的。因此这个图中的问题不是寻找最短路径,而是找到并行完成图中的所有点所需要的最短时间,以及最晚的时间。
解决这个问题需要把上面的动作节点图转换为下面的事件节点图
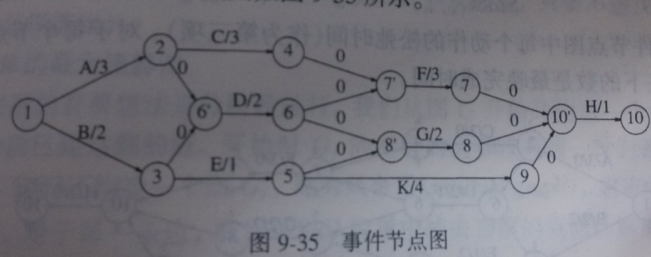
对于事件节点图,只需要找出第一个事件到最后一个事件的最长路径的长就好了。
假设$ECi$表示节点$i$的最早完成时间,那么利用下面的法则
$EC_i = 0$
$EC_w = max{ (v, w) \in E } (ECv + C{v, w})$
最早完成时间结果为: